
IIWA Kinematics
Published:
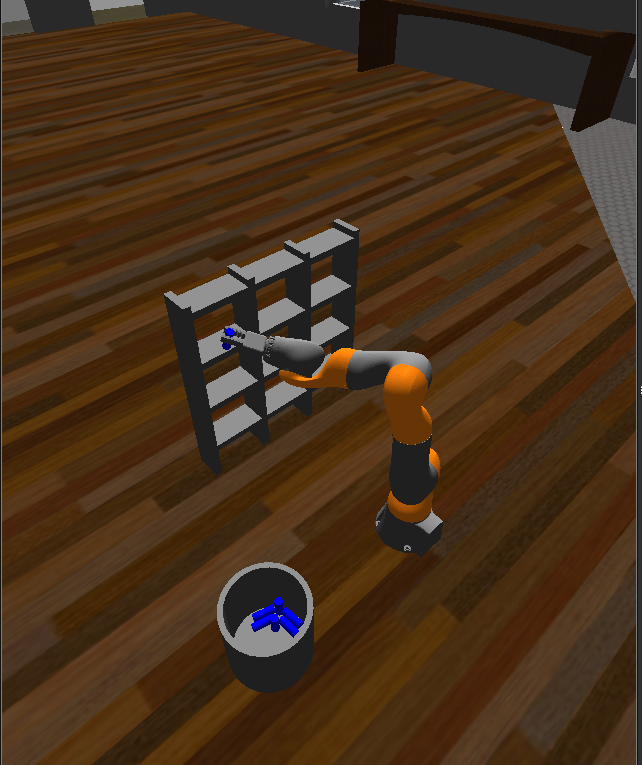
Given a list of end-effector poses, calculate joint angles using Inverse Kinematics for the KUKA LBR IIWA R820
github repo https://github.com/gwwang16/iiwa_kinematics
Kinematics implementation for the KUKA LBR IIWA R820 (14 Kg).
Ubuntu 16.04 + ROS Kinetic
Kinematics implementation for the KUKA LBR IIWA R820 (14 Kg).  Video: https://youtu.be/L5daeWuy1js
Video: https://youtu.be/L5daeWuy1js
Getting Started
If you do not have an active ROS workspace, you can create one by:
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/
$ catkin_make
Clone this repo into the src directory of your workspace:
$ cd ~/catkin_ws/src
$ git clone https://github.com/gwwang16/iiwa_kinematics.git
Install dependencies
$ cd ~/catkin_ws
$ sudo apt-get update
$ rosdep install --from-paths src --ignore-src --rosdistro=kinetic -y
$ cd ~/catkin_ws/src/iiwa_kinematics/iiwa_arm/scripts
$ chmod +x safe_spawner.sh
$ chmod +x target_spawn.py
$ chmod +x IK_server.py
Build the project:
$ cd ~/catkin_ws
$ catkin_make
Add following to your .bashrc file
$ export GAZEBO_MODEL_PATH=~/catkin_ws/src/iiwa_kinematics/iiwa_arm/models
$ source ~/catkin_ws/devel/setup.bash
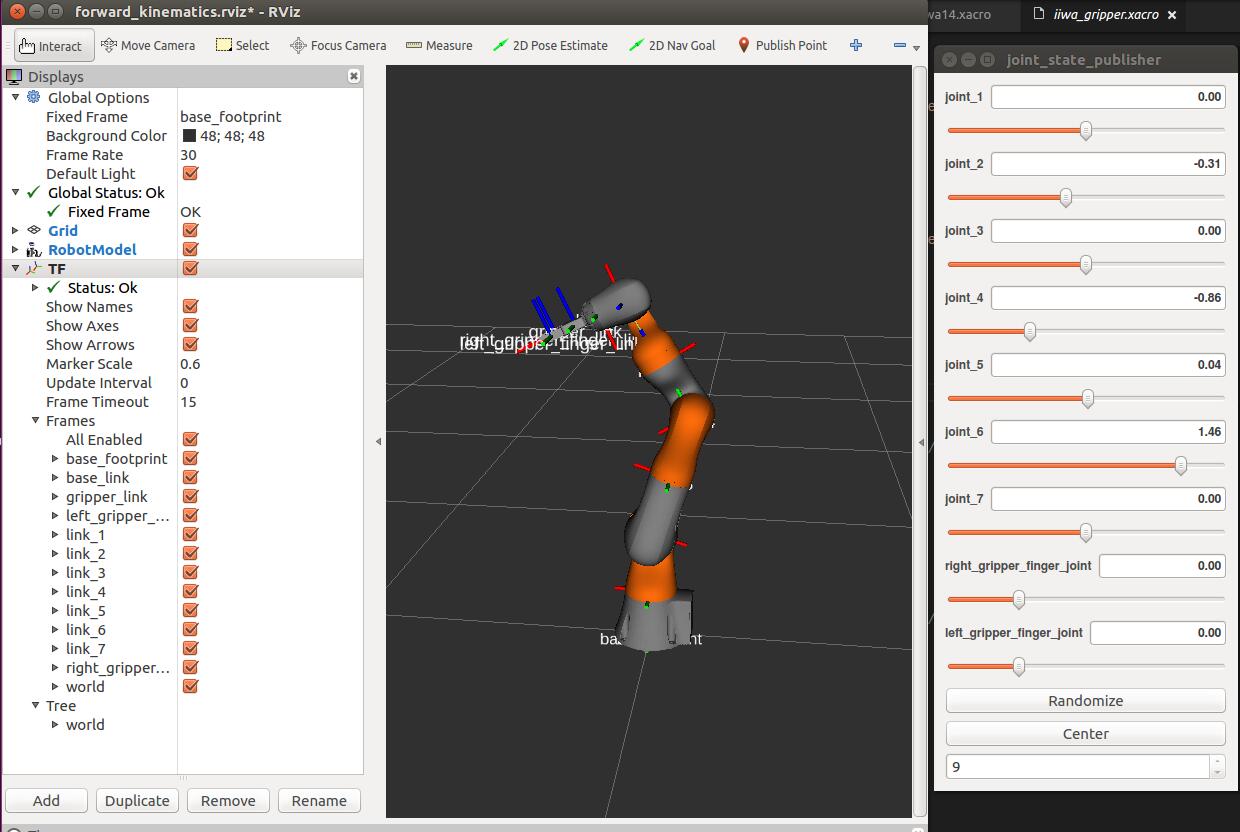
Forward kinematics demo
For demo mode make sure the demo flag is set to “true” in inverse_kinematics.launch file under iiwa_kinematics/iiwa_arm/launch
$ roslaunch iiwa_arm forward_kinematics.launch
Launch the project
$ cd ~/catkin_ws/src/iiwa_kinematics/iiwa_arm/scripts
$ ./safe_spawner.sh
To run your own Inverse Kinematics code change the demo flag described above to “false” and run your code (once the project has successfully loaded) by:
$ cd ~/catkin_ws/src/iiwa_kinematics/iiwa_arm/scripts
$ rosrun iiwa_arm IK_server.py
IK Steps
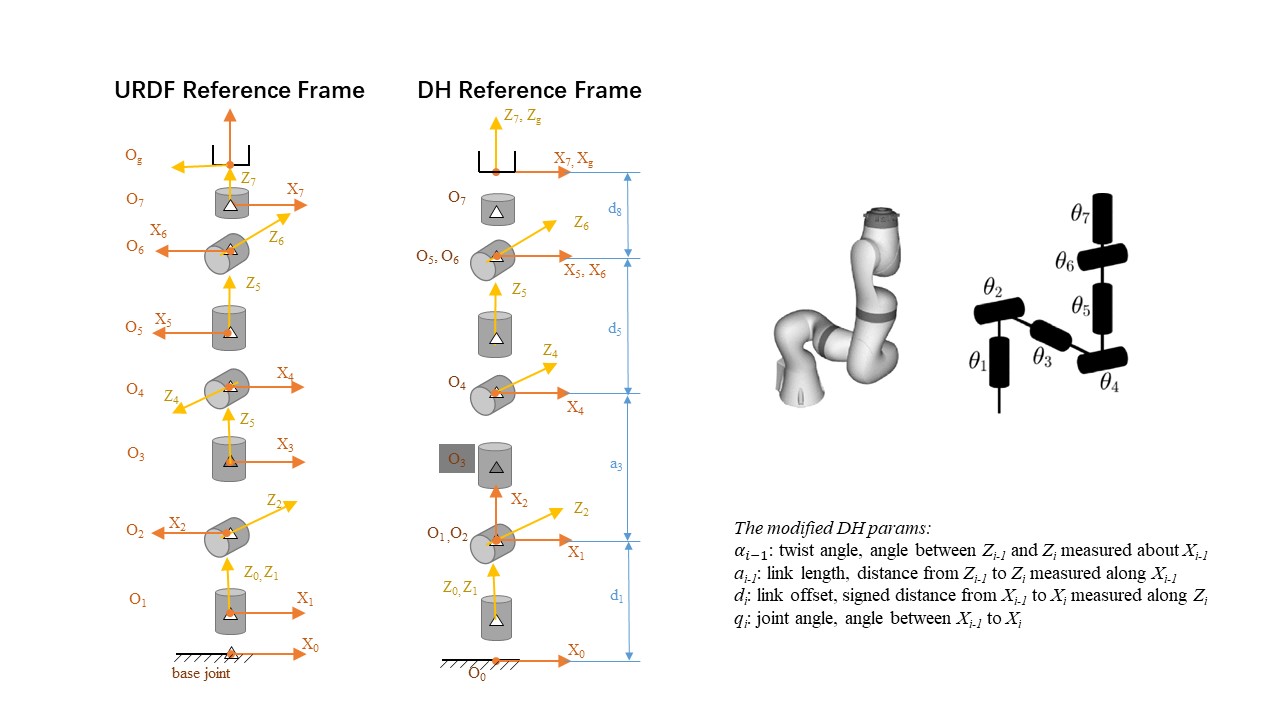
Table.I The relative location of joint i-1 to i
| Joint | X | Y | Z | Roll, Pitch, Yaw |
|---|---|---|---|---|
| 1 | 0 | 0 | 0.1575 | (0, 0, 0) |
| 2 | 0 | 0 | 0.2025 | (pi/2, 0, pi) |
| 3 | 0 | 0.2045 | 0 | (pi/2, 0, pi) |
| 4 | 0 | 0 | 0.2155 | (pi/2, 0, 0) |
| 5 | 0 | 0.1845 | 0 | (-pi/2, pi, 0) |
| 6 | 0 | 0 | 0.2155 | (pi/2, 0, 0) |
| 7 | 0 | 0.081 | 0 | (-pi/2, pi, 0) |
| gripper | 0 | 0 | 0.08 | (0, -pi/2, 0) |
Now, we can obtain our modified DH table.
Note: joint3 is fixed to remove redundant dof.
Table. II The modified DH parameters
| Joint | $\alpha_{i-1}$ | $a_{i-1}$ | $d_i$ | $\theta_i$ |
|---|---|---|---|---|
| 1 | 0 | 0 | 0.36 | q1 |
| 2 | -pi/2 | 0 | 0 | q2:q2-pi/2 |
| 4 | 0 | 0.42 | 0 | q4:-q4+pi/2 |
| 5 | -pi/2 | 0 | 0.4 | q5 |
| 6 | pi/2 | 0 | 0 | q6 |
| 7 | -pi/2 | 0 | 0 | q7 |
| g | 0 | 0 | 0.161 | q8:0 |
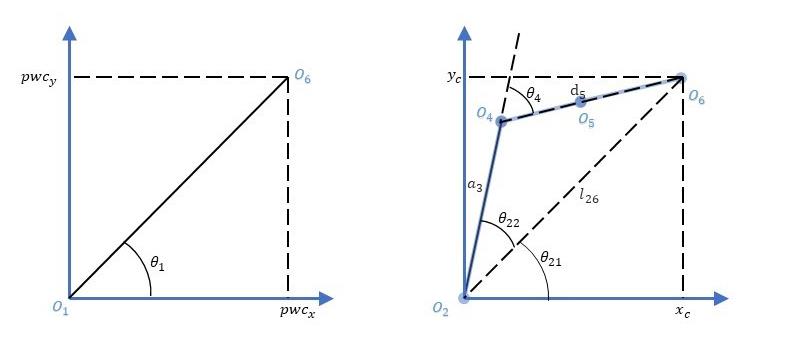
theta1,2,4
Note: R_corr is 1 here. Because reference frame between URDF O7 and DH O7 are same, IK server called Link 7 pose immediately for convenience.
theta5-7
R4_7 =
Matrix([
[-sin(q5)*sin(q7) + cos(q5)*cos(q6)*cos(q7), -sin(q5)*cos(q7) - sin(q7)*cos(q5)*cos(q6), sin(q6)*cos(q5)],
[ sin(q6)*cos(q7), -sin(q6)*sin(q7), -cos(q6)],
[ sin(q5)*cos(q6)*cos(q7) + sin(q7)*cos(q5), -sin(q5)*sin(q7)*cos(q6) + cos(q5)*cos(q7), sin(q5)*sin(q6)]])
def Euler_angles_from_matrix_URDF(R, angles_pre):
r13 = R[0,2]
r21, r22, r23 = R[1,0], R[1,1], R[1,2]
r32, r33 = R[2,1], R[2,2]
if r23 is not 0:
q6 = atan2(sqrt(r13**2 + r33**2), -r23)
if sin(q6) < 0:
q5 = atan2(-r33, -r13)
q7 = atan2(r22, -r21)
else:
q5 = atan2(r33, r13)
q7 = atan2(-r22, r21)
else:
q5 = angles_pre[4]
q6 = angles_pre[5]
q7 = angles_pre[6]
return np.float64(q5), np.float64(q6), np.float64(q7)
References:
Udacity kinematics project: https://github.com/udacity/RoboND-Kinematics-Project
iiwa urdf and gazebo package: https://github.com/rtkg/lbr_iiwa
Computing Euler angles from a rottion matrix http://thomasbeatty.com/MATH%20PAGES/ARCHIVES%20-%20NOTES/Applied%20Math/euler%20angles.pdf