Lyft Perception Challenge
Achieve pixel-wise identification of objects in camera images.

Achieve pixel-wise identification of objects in camera images.
Given a list of end-effector poses, calculate joint angles using Inverse Kinematics for the KUKA LBR IIWA R820.
Use deep neural networks to clone driving behavior.
Deep reinforcement learning on NVIDIA Jetson tx2 with PyTorch, OpenAI Gym, and Gazebo robotics simulator.
Identify target objects on a tabletop, and pick up and place them in corresponding drop boxes using PR2.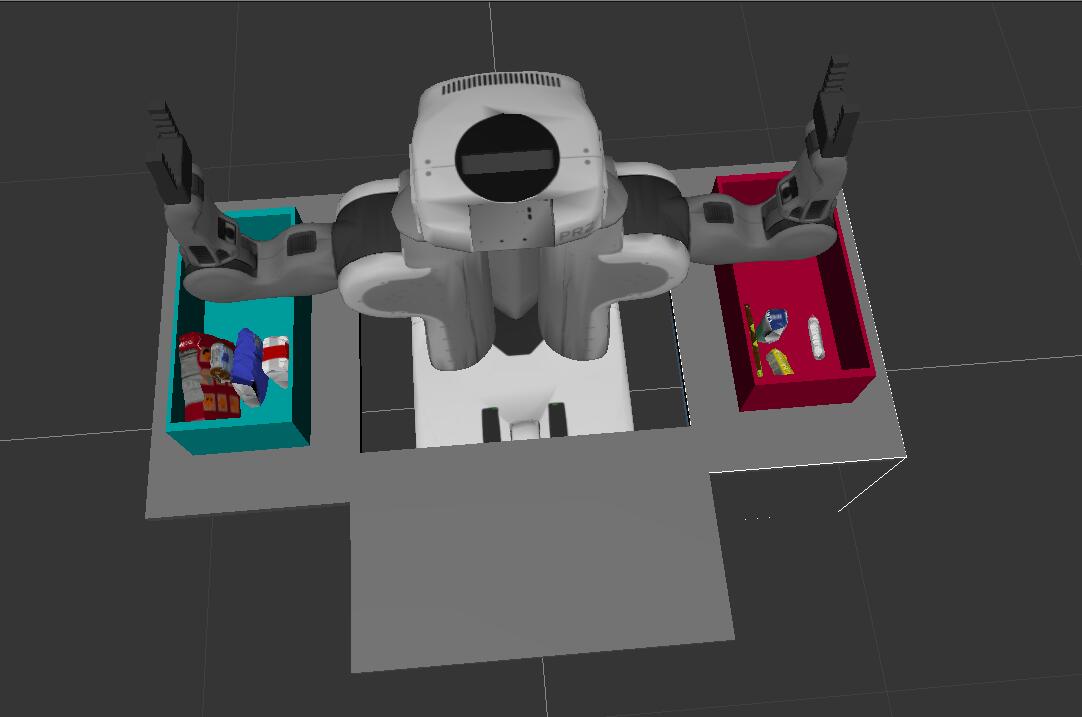
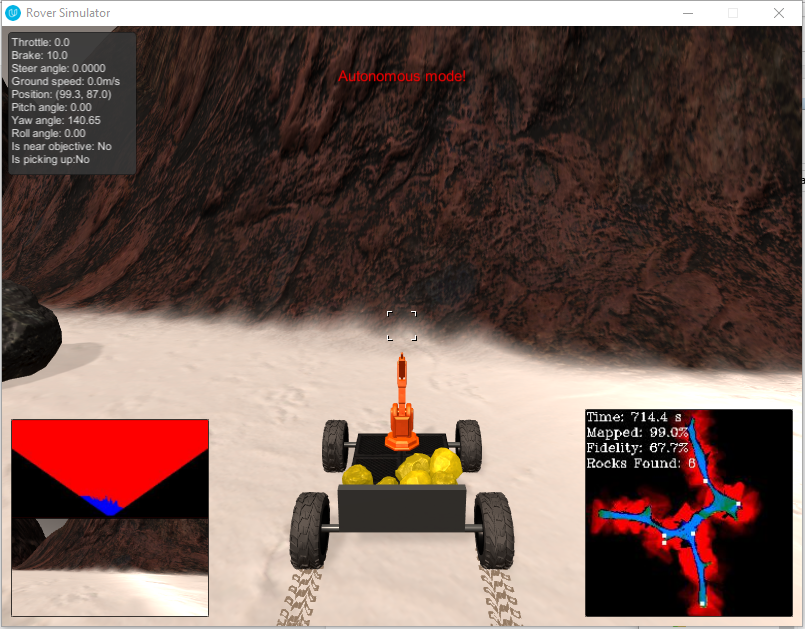
A project is modeled after the NASA sample return challenge.